基于d3qn的避障优先无地图导航算法
首发时间:2023-11-27
摘要:使用深度强化学习技术来解决智能车的无地图导航问题,是当前关于无地图导航研究的主流。然而在当前基于深度学习强化学习的无地图导航算法中,奖励函数的设计通常会使强化学习模型的训练面临奖励稀疏的问题。本文将无地图导航问题转换成避障和导航两个子问题,并针对该问题设计了一种奖励函数,将该奖励函数与d3qn算法结合,提出了一种基于d3qn的避障优先无地图导航算法。使用该算法可以解决奖励稀疏的问题,在训练初期提高智能车的避障能力,增大智能车探索到目标点的概率,从而加快模型训练的速率。同时,本文给出了该算法能够解决导航问题的理论证明,且通过实验验证了其正确性。
关键词:
for information in english, please click here
an obstacle avoidance first mapless navigation algorithm based on d3qn
abstract:using deep reinforcement learning technology to solve the map-less navigation problem of smart cars is the current mainstream of map-less navigation research. in current map-less navigation algorithms based on deep learning reinforcement learning, the design of the reward function usually causes the training of reinforcement learning models to face the sparse reward problem. this paper converts the mapless navigation problem into two sub-problems of obstacle avoidance and navigation, and designs a reward function for this problem. combining the reward function with the d3qn algorithm, a d3qn-based obstacle avoidance priority mapless navigation algorithm is proposed. this algorithm can solve the sparse reward problem, improve the obstacle avoidance ability of the smart car in the early stage of training, and increase the probability of arrival in the exploratory phase, thus speeding up the model training rate. at the same time, this article provides a theoretical proof that the algorithm can solve the problem of mapless navigation, and its correctness is verified through experiments.
keywords:
基金:
论文图表:
引用
导出参考文献


no.****
动态公开评议
共计0人参与
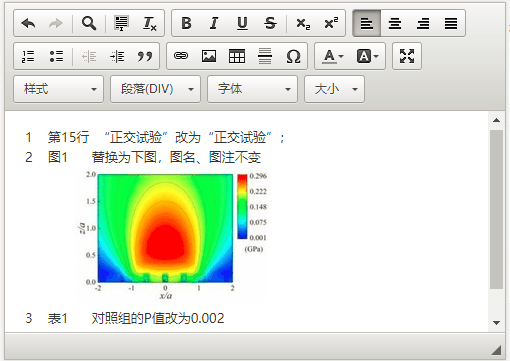
勘误表
基于d3qn的避障优先无地图导航算法


评论
全部评论